悟空2040-Pico
介绍

悟空2040 是一款为 Raspberry Pi Pico 设计的多功能扩展板。
在功能上,它板载蜂鸣器、A\B按键、彩虹灯、电机接口、复位按钮等,满足创客们的IO编程以及扩展外设所需。
在续航上,它支持大容量的18650电池,板载智能电源管理芯片与贴心的电量指示,正常使用时长可达120分钟以上。
在结构上,它采用标准 7 × 11 方形积木框作为底座,可以为悟空2040扩展出各种生动的造型。
更为贴心的是,恩孚科技为初学者提供了丰富的学习案例,可以帮助您快速入门创客世界,并应用到实际生活中。
Raspberry Pi Pico 是一款树莓派官方设计的高性能、体积小的微控制器开发板。采用树莓派官方自研的 RP2040 微控制器芯片,搭载了ARM Cortex M0 + 双核处理器,高达 133MHz 的运行频率,内置了 264KB 的 SRAM 和 2MB 的内存,还板载有多达 26 个多功能的 GPIO 引脚。
特性
- 板载蜂鸣器、A\B按键、彩虹灯、复位按钮等元器件,集成度高、功能强大。
- 支持大容量的18650电池,板载智能电源管理芯片与电量指示,让学习者摆脱电源烦恼,随时随地享受创造乐趣。
- 扩展出多达14路通用 IO 引脚,并且单独引出 I2C 接口,极大方便学习者连接各种外设。
- 标准的积木框底座,方便结构搭建。
- 支持多种编程方式:MicroPython、CircuitPython、C、C++。
- 丰富的学习案例。
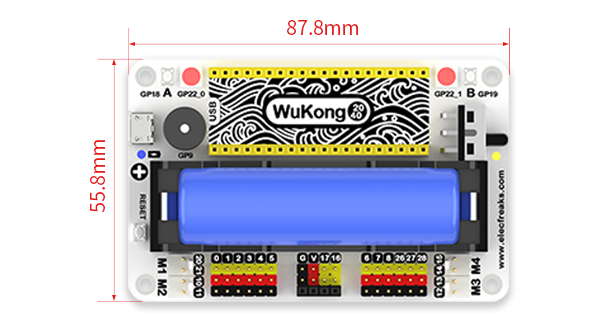
尺寸参数
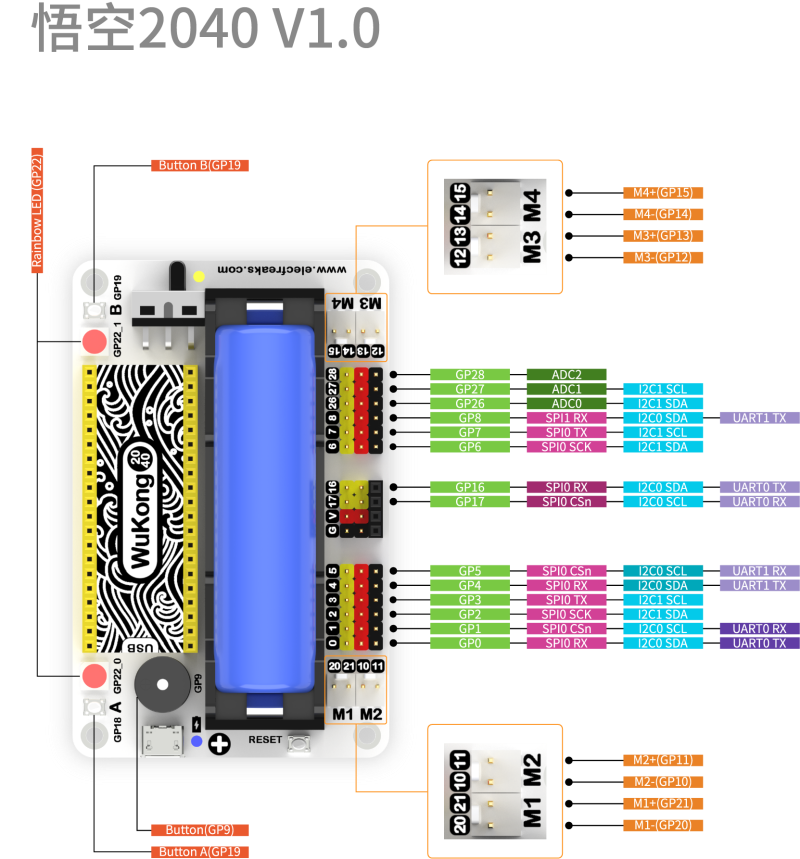
模块介绍
详细参数
| 项目 | 参数 |
|---|---|
| 产品编号 | EF02054 |
| 尺寸 | 87.8 × 55.8 × 36.3mm |
| 净重 | 50g(不含电池、不含Pico) |
| 电源开关 | 拨动切换开关 |
| 供电方式 | 18650锂电池(选配) |
| 充电电流 | 1000mA |
| 充电时间 | 约 120 min |
| 工作电压 | 2.8V~4.2V |
| 综合续航时间 | 60min |
| 扩展 GPIO 接口 | 14 路 |
| IIC 接口 | 支持 |
| SPI 接口 | 支持 |
| UART 接口 | 支持 |
| 板载器件 | 2 × 彩虹灯;2 × 按钮;1 × 蜂鸣器 |
| 电机驱动 | 4路(M1、M2、M3、M4) |
| 电机工作电压 | 3.7V |
| 固定方式 | 含11×7方形积木框,可支持积木搭建 |
编程环境配置
前言
Raspberry Pi Pico 支持C、C++、MicroPython、CircuitPython等编程方式,点击下方链接下载相应的驱动文件。
本文所有的案例基于 CircuitPython,如果您是初次接触 Raspberry Pi Pico 建议先下载 CircuitPython 驱动程序,参考案例进行学习。
CircuitPython 是一种编程语言,旨在简化在低成本微控制器板上进行编码的实验和学习。CircuitPython 是对微控制器进行编程的最简单方法。
您可以通过 CircuitPython 官网和论坛了解更多详细内容。
| 固件 | 链接 |
|---|---|
| CircuitPython | https://circuitpython.org/board/raspberry_pi_pico/ |
点击固件下载页面后,点击下图位置的链接:

固件安装
完整固件烧录演示如下图所示:
第一步:按下 Raspberry Pi Pico 板载 BOOSEL 按钮不松开。
第二步:使用良好的 USB 数据线将 Raspberry Pi Pico 连接计算机,当电脑磁盘目录显示“RPI-RP2”驱动器时,可以松开 Raspberry Pi Pico 板载 BOOSEL 按钮。

第三步:拖动之前下载好的 UF2 文件到"RPI-RP2"磁盘中,等复制完成后,“RPI-RP2”盘符会消失,新出现“CIRCUITPY”驱动器。恭喜您,已经成功安装 CircuitPython。

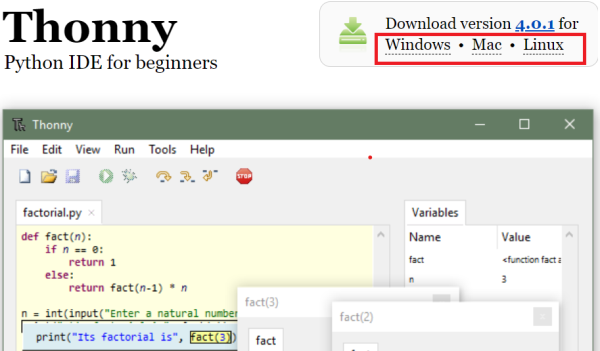
编程平台设置
本文档所有案例编程文件均在 Thonny 中编写完成,如果您是初次接触 Raspberry Pi Pico,建议您编写程序从 Thonny 入手。点击下方链接选择适配您电脑操作系统平台的 Thonny 并下载。
Thonny 是一款面向初学者的入门级 Python IDE,专为学习和教学编程而设计的。Thonny 由爱沙尼亚的 Tartu 大学开发,对硬件编程用户非常友好,可以根据不同的开源硬件选择不同的解释器。
| 名称 | 链接 |
|---|---|
| Thonny | https://thonny.org/ |
选择 Thonny 解释器
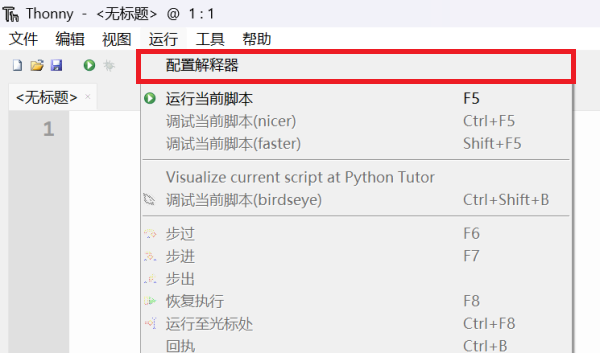
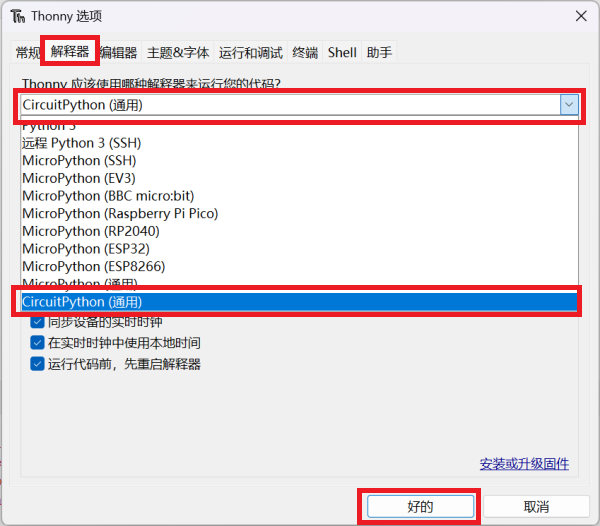
将安装在电脑上的 Thonny 打开,点击“运行”选项中的“配置解释器”菜单,在“解释器”选项下,点击选择解释器下拉菜单选择“CircuitPython(通用)”,点击“好的”完成解释器配置。
步骤如图所示:
开始使用
悟空2040 扩展板开机及充电方式
- 如下图(1)所示,上拨电源开关,悟空2040扩展板关机。
- 下拨电源开关,悟空2040扩展板开机,电源指示灯亮起。
- 将USB电源线连接至充电口,如下图(2),电量指示灯亮起。
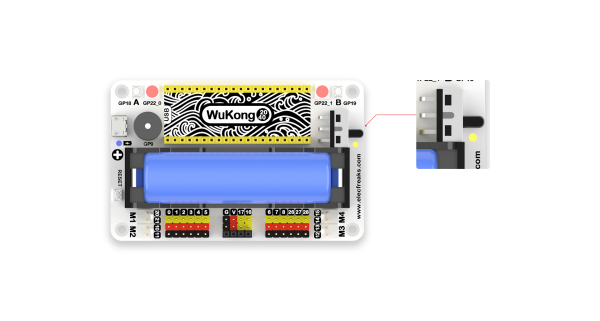
(图1)
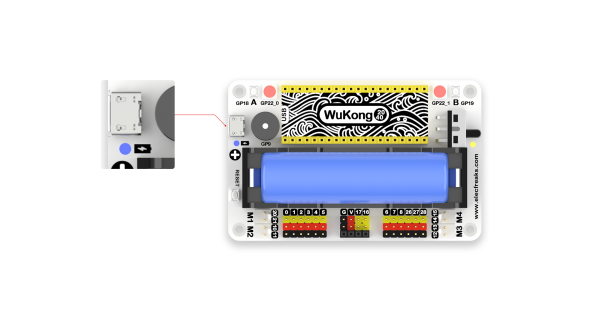
(图2)
电量指示灯状态:
电量低于20%,指示灯颜色为红色;
电量在20%~80%,指示灯颜色为橙色;
电量高于80%,指示灯颜色为绿色。
充电指示灯状态:
未充满状态,指示灯颜色为红色;
充满状态,指示灯颜色为绿色。
项目案例
案例一:点亮 Raspberry Pi Pico 板载LED灯
Raspberry Pi Pico 板载一颗 LED 灯,引脚为GP25。编程实现 LED 灯呈现呼吸效果。
代码参考一:
import board # 导入board库,从过引脚访问硬件
import time # 导入time库,用于控制代码执行,比如通过不同休眠时间暂停程序执行
import digitalio # 导入digitalio库,允许访问并设置硬件为输入输出
led_onboard = digitalio.DigitalInOut(board.LED) # 创建board.LED对象
led_onboard.direction = digitalio.Direction.OUTPUT # 设置为输出模式
while True:
led_onboard.value = True # 设置板载 led 灯为高电平(点亮)
time.sleep(1)
led_onboard.value = False # 设置板载 led 灯为低电平(熄灭)
time.sleep(1)
代码参考二:
import time
import board
import pwmio # 导入pwmio,该模块包含对基本脉冲访问的类
led_onboard = pwmio.PWMOut(board.LED, frequency=5000, duty_cycle=0) # 从引脚创建pwm对象输出
while True:
for i in range(100):
if i < 50:
led_onboard.duty_cycle = int(i * 2 * 65535 / 100) # 设置占空比值
else:
led_onboard.duty_cycle = 65535 - int((i - 50) * 2 * 65535 / 100)
time.sleep(0.01)
案例二:可编程按钮A\B
悟空2040板载两颗可编程按钮A\B,编程实现按下悟空2040板载A按键,Raspberry Pi Pico 板载LED灯会点亮,按下B按键,LED灯会熄灭。
代码参考:
import board
import digitalio
led_onboard = digitalio.DigitalInOut(board.LED)
led_onboard.direction = digitalio.Direction.OUTPUT
button_a = digitalio.DigitalInOut(board.GP18) # 从引脚创建wukong2040按键A的对象
button_b = digitalio.DigitalInOut(board.GP19)
button_a.direction = digitalio.Direction.INPUT # 设置button_a为输出模式
button_b.direction = digitalio.Direction.INPUT
button_a.pull = digitalio.Pull.UP # 设置上拉
button_b.pull = digitalio.Pull.UP
while True:
if button_a.value == False: # button_a.value的值为A按键的状态值,按下为0,松开为1
led_onboard.value = True
elif button_b.value == False: # button_b.value的值为B按键的状态值,按下为0,松开为1
led_onboard.value = False
案例三:点亮全彩灯珠
悟空2040板载两颗全彩 LED 灯珠(ws2812b),引脚编号为GP22_0,GP22_1。编程实现两颗灯珠变换颜色闪烁。
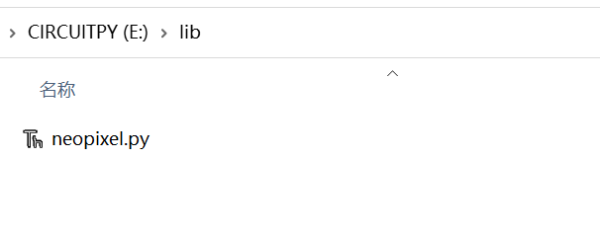
使用 CircuitPython 对全彩灯珠(ws2812b)进行编程,需要使用到 neopixel 库文件,可以点击下方链接下载 neopixel 库文件并保存到 “CIRCUITPY” 驱动器 “lib” 目录下面。
| neopixel 库文件链接 | https://github.com/adafruit/Adafruit_CircuitPython_NeoPixel |
|---|
如图所示:
代码参考:
import time
import board
from rainbowio import colorwheel
import neopixel
NUMPIXELS = 2
SPEED = 0.05
BRIGHTNESS = 0.2 # 数值在(0.0, 1.0),其中0.0为关闭,1.0为最大
PIN = board.GP22 # 彩虹灯珠引脚为GP22
pixels = neopixel.NeoPixel(PIN, NUMPIXELS, brightness=BRIGHTNESS, auto_write=False)
def rainbow_cycle(wait):
for color in range(255):
for pixel in range(len(pixels)):
pixel_index = (pixel * 256 // len(pixels)) + color * 5
pixels[pixel] = colorwheel(pixel_index & 255)
pixels.show()
time.sleep(wait)
while True:
rainbow_cycle(SPEED)
案例四:驱动蜂鸣器
悟空2040板载蜂鸣器,引脚编号为GP9,编程实现按下蜂鸣器播放一段音乐。
代码参考:
import time
import array
import math
import board
import digitalio
from audiocore import RawSample
try:
from audioio import AudioOut
except ImportError:
try:
from audiopwmio import PWMAudioOut as AudioOut
except ImportError:
pass
button = digitalio.DigitalInOut(board.GP18)
button.switch_to_input(pull=digitalio.Pull.UP)
tone_volume = 0.9
frequency = 440
length = 8000 // frequency
sine_wave = array.array("H", [0] * length)
for i in range(length):
sine_wave[i] = int((1 + math.sin(math.pi * 2 * i / length)) * tone_volume * (2 ** 15 - 1))
audio = AudioOut(board.GP9)
sine_wave_sample = RawSample(sine_wave)
while True:
if not button.value:
audio.play(sine_wave_sample, loop=True)
time.sleep(1)
audio.stop()
案例五:驱动电机
悟空2040板载4路电机接口:M1、M2、M3、M4,编程实现电机M2旋转5秒后停止。
代码参考:
import board
import digitalio
import time
motor = digitalio.DigitalInOut(board.GP10)
motor.direction = digitalio.Direction.OUTPUT
while True:
motor.value = True
time.sleep(5)
motor.value = False
time.sleep(5)
案例五 驱动S90舵机
悟空2040板载12路扩展IO接口(引脚:0,1,2,3,4,5,6,7,8,26,27,28),可以用于驱动S90舵机。如果使用转接线连接舵机与悟空2040板载引脚接口(引脚:16,17)同样可以驱动S90舵机。
| adafruit_motor 库文件下载链接 | https://github.com/adafruit/Adafruit_CircuitPython_Motor/archive/refs/heads/main.zip |
|---|
使用 CircuitPython 对舵机进行编程
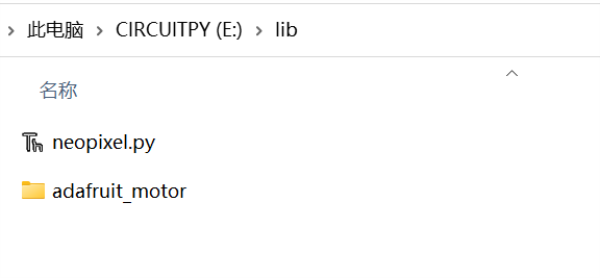
需要使用到 adafruit_motor 库文件,可以点击上方链接下载 adafruit_motor 库文件并保存到 “CIRCUITPY” 驱动器 “lib” 目录下面。
如图所示:
代码参考:
import time
import board
import pwmio
from adafruit_motor import servo
pwm = pwmio.PWMOut(board.GP0, duty_cycle=2 ** 15, frequency=50)
my_servo = servo.Servo(pwm)
while True:
for angle in range(0, 180, 5):
my_servo.angle = angle
time.sleep(0.05)
for angle in range(180, 0, -5):
my_servo.angle = angle
time.sleep(0.05)
案例六:使用GPIO引脚驱动LED灯
悟空2040板载12路扩展IO接口(引脚:0,1,2,3,4,5,6,7,8,26,27,28),可以用于驱动LED灯等数字信号传感器。
案例演示使用恩孚科技公司Octopus系列传感器。
代码参考:
# 导入程序所需要的模块
import board
from digitalio import *
from time import *
# 设置LED灯连接的引脚和引脚方向
led_0 = DigitalInOut(board.GP0)
led_1 = DigitalInOut(board.GP1)
led_0.direction = Direction.OUTPUT
led_1.direction = Direction.OUTPUT
# 设置2颗LED灯的状态在亮、灭之间切换
while True:
led_0.value = True
led_1.value = False
sleep(1)
led_0.value = False
led_1.value = True
sleep(1)
案例七:读取电位器值
Raspberry Pi Pico 上的GP26、GP27、GP28引脚可以用作GPIO或ADC(模数转换器)输入,可以在编程中进行选择模式。
案例演示使用恩孚科技公司Octopus系列传感器。
代码参考:
import time
import board
from analogio import AnalogIn
analog_in = AnalogIn(board.GP26)
while True:
print(analog_in.value)
time.sleep(0.1)
案例八:驱动OLED屏幕
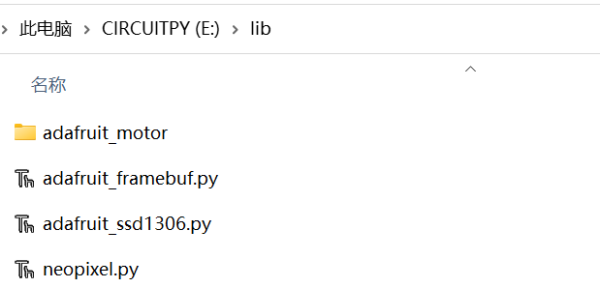
悟空2040板载IIC引脚(GP16、GP17),可以通过IIC驱动OLED显示屏,需要adafruit_ssd1306.py库文件以及adafru_framebuf.py库文件,点击下方链接进行下载,并将adafruit_ssd1306.py、adafru_framebuf.py保存到 “CIRCUITPY” 驱动器 “lib” 目录下面。
| adafruit_ssd1306.py库文件下载链接 | https://github.com/adafruit/Adafruit_CircuitPython_SSD1306 |
|---|---|
| adafru_framebuf.py库文件下载链接 | https://github.com/adafruit/Adafruit_CircuitPython_framebuf/releases/tag/1.4.14 |
如图所示:
案例演示使用恩孚科技公司Octopus系列传感器。OLED显示屏分辨率为:128*64。
代码参考:
import board
import busio
import adafruit_ssd1306
import time
i2c = busio.I2C(board.GP17, board.GP16)
display = adafruit_ssd1306.SSD1306_I2C(128, 64, i2c, addr=0x3C)
bgColor=0
display.fill(bgColor)
for i in range(0,display.height,4):
for j in range(0,display.width,4):
display.pixel(j, i, not bgColor)
display.show()
display.fill(bgColor)
for i in range(0,display.height,4):
display.hline(0, i,display.width, not bgColor)
display.show()
display.fill(bgColor)
for i in range(0,display.width,8):
display.vline(i, 0,display.height, not bgColor)
display.show()
display.fill(bgColor)
for i in range(0,display.height,4):
display.line(0, 0, display.width, i, not bgColor)
display.line(display.width, display.height, 0, display.height-i, not bgColor)
display.show()
display.fill(bgColor)
for i in range(0,display.width//2,4):
display.circle(display.width//2, display.height//2, i, not bgColor)
display.show()
display.fill(bgColor)
for i in range(0,display.height,16):
for j in range(0,display.width,16):
display.rect(j, i, 12, 12, not bgColor)
display.show()
for i in range(0,display.height,16):
for j in range(0,display.width,16):
display.fill_rect(j+2, i+2, 8, 8, not bgColor)
display.show()
display.fill(bgColor)
Wukong2040购买链接
您可以从此链接购买:Wukong2040。