remote door opener
功能简介
当有人访问房子时,按动碰撞传感器,此时门锁端的micro:bit发送信号通知遥控端的micro:bit,当遥控端的micro:bit接收到信号时,显示图案,此时按下遥控端的micro:bit的A按键,则门锁端的micro:bit显示笑脸图标并控制舵机打开房门,并在OLED显示屏上显示“Welcome”,如果按下遥控端的micro:bit的B按键,则门锁端的micro:bit显示×图标,并在OLED显示屏上显示“Refused to enter”。
课前准备
2 × micro:bit V2
1 × Classrom Smart Home Kit
1 × micro USB 数据线
1 × Smart Home Material Pack
课程目标
了解micro:bit的无线通信功能。
了解碰撞传感器和舵机的工作原理。
掌握OLED显示屏的使用方法。
探究问题
micro:bit的无线通信是否可以同时和多个micro:bit进行通信?
使用micro:bit的无线通信功能时,如何防止相互干扰的?
碰撞传感器和舵机时如何工作的?
扩展知识
碰撞传感器的工作原理
碰撞传感器通过内部的机械结构来完成电路的导通和中断,当碰撞传感器的外部探测臂受到碰撞,探测臂受力下压,带动碰撞传感器内部的簧片拨动,从而电路的导通状态发生改变。
舵机的工作原理
伺服电机通常被称为舵机,它是一种带有输出轴的小装置。当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
控制线用于传输角度控制信号。这个角度是由控制信号脉冲的持续时间决定的,这叫做脉冲编码调制(PCM)。舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围,总间隔为2ms。脉冲的宽度将决定马达转动的距离。例如:1.5毫秒的脉冲,电机将转向90度的位置(通常称为中立位置,对于180°舵机来说,就是90°位置)。如果脉冲宽度小于1.5毫秒,那么电机轴向朝向0度方向。如果脉冲宽度大于1.5毫秒,轴向就朝向180度方向。以180度舵机为例,对应的控制关系是这样的:
0.5ms————-0度; 1.0ms————45度; 1.5ms————90度; 2.0ms———–135度; 2.5ms———–180度;

硬件连接
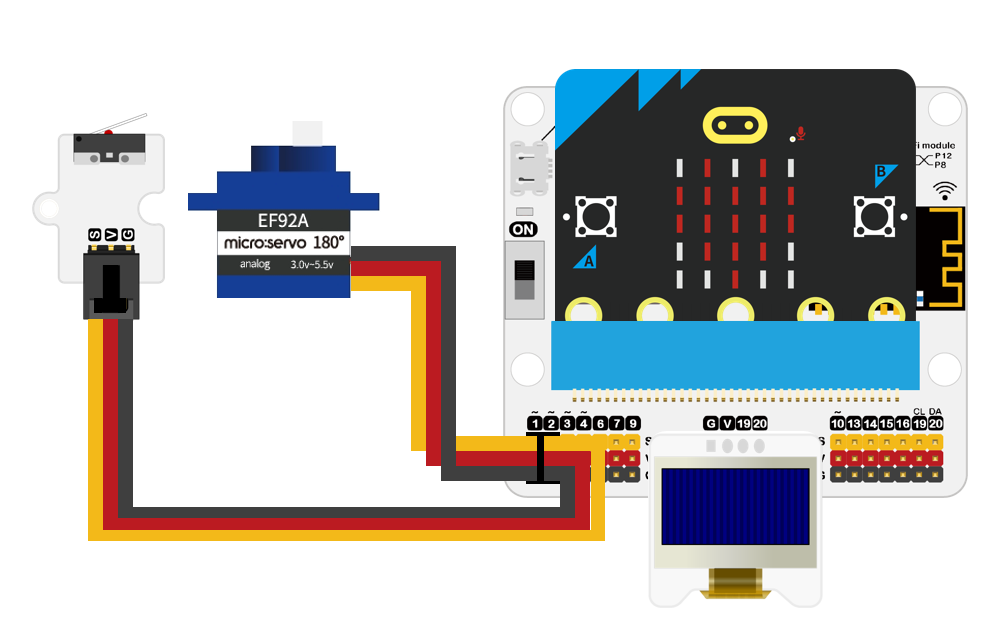
碰撞传感器连接到IOT:bit的P2端口,将舵机连接到IOT:bit的P1端口。
软件编程
添加软件库
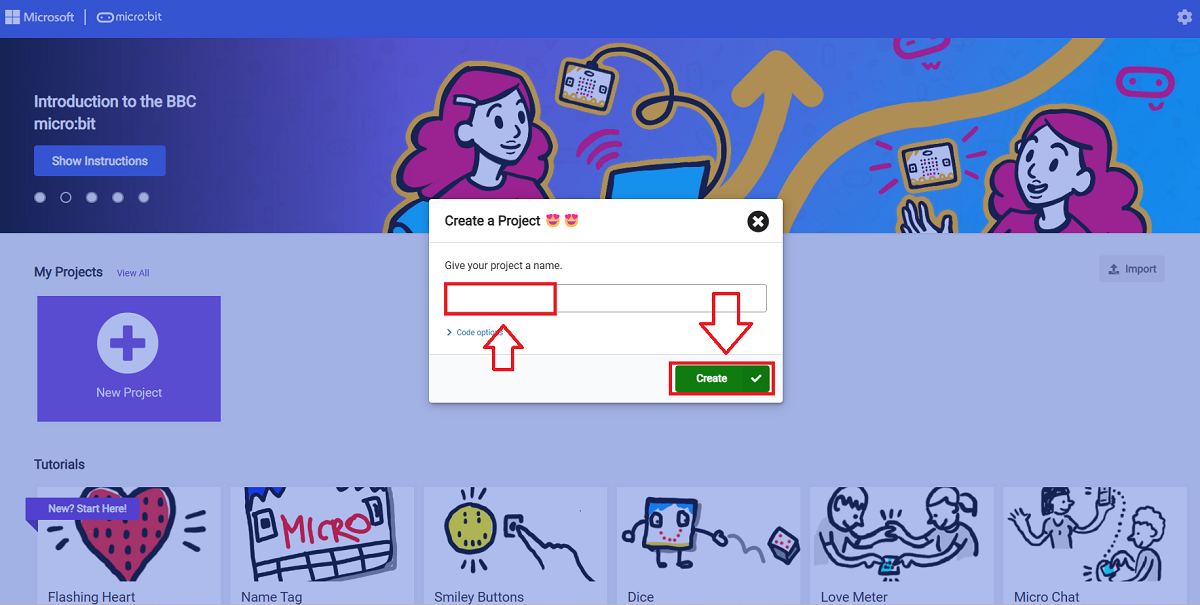
点击新建项目,在弹出的窗口填入项目名称并点击新建。
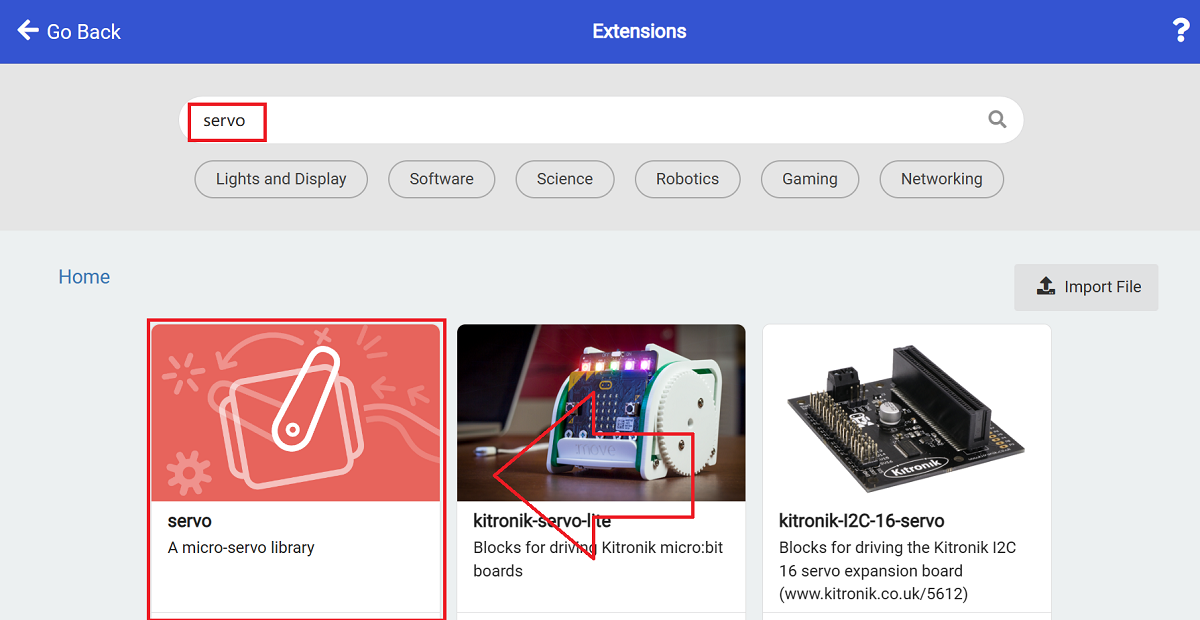
点击扩展

在弹出界面的搜索栏输入servo,点击搜索,在搜索结果中选择舵机的软件库。
安装须知
在安装舵机前,需要先调整舵机角度。
当按键A被按下时,控制连接到P1的舵机转动到90度。
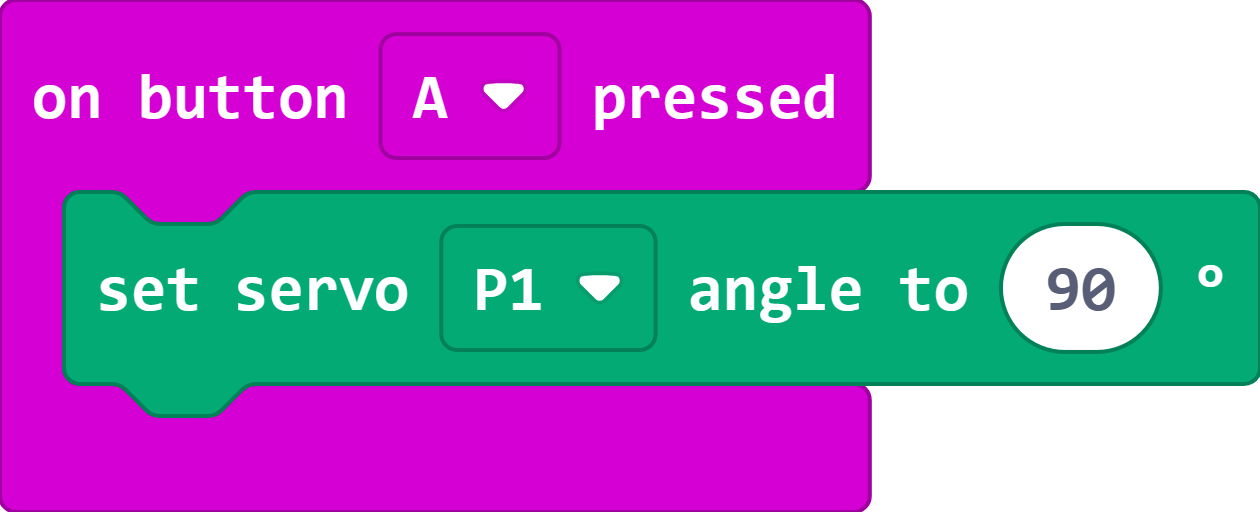
编写并下载程序。
舵机位置初始化程序:https://makecode.microbit.org/S33825-77887-10264-59836
按下micro:bit上的按键A,控制舵机转动到90度。
转动传动杆,让房门处于关闭状态,调整完成后再将传动杆安装到舵机上。
程序详解
门锁端程序
当开机时,
设置micro:bit的LED矩阵显示爱心图标,以确保程序下载成功;
初始化OLED显示屏;
设置无线通信组别为1;
初始化舵机角度为90°;
设置P2引脚上拉。

在无限循环中判断连接在P2引脚的碰撞传感器是否被按下,
当碰撞传感器被按下时,无线发送数字1,延迟200ms,防止按键抖动,
否则无线发送数字0。

当无线通信接收到信号时;
如果接收到的信号为“Open”;
则OLED显示屏显示“Welcome”;
控制连接到P1的舵机转动到0°,将门打开,暂停5000ms,然后控制舵机转动到90°,将门关闭;
清除OLED显示屏显示信息,micro:bit的LED矩阵显示爱心图标;
否则如果接收到的信号为“Refused”;
则OLED显示屏显示“Refused to enter”;
micro:bit的LED矩阵显示错误图标,暂停5000ms;
清除OLED显示屏显示信息,micro:bit的LED矩阵显示爱心图标;

程序链接:https://makecode.microbit.org/S43729-79384-22654-20945
遥控端程序
当开机时,
设置无线通信组别为1;
设置micro:bit的LED矩阵显示爱心图标,以确保程序下载成功;
设置变量key为false。

当无线通信接收到信号时;
如果接收到的信号为1;
则设置变量radio的值为1;
如果接收到的信号为0;
则设置变量radio的值为0;

在无限循环中判断变量radio的值,
当变量radio的值为1时,
设置micro:bit的LED矩阵显示菱形图标;
设置变量key为ture;
当变量key为ture时,进入循环,判断按键A或者按键B是否按下;
当按键A被按下时,micro:bit的LED矩阵显示笑脸图标,无线通信发送Open,设置变量key为false;
当按键B被按下时,micro:bit的LED矩阵显示错误图标,无线通信发送Refused,设置变量key为false;
当变量key为false时,自动跳出循环,micro:bit的LED矩阵显示爱心图标。
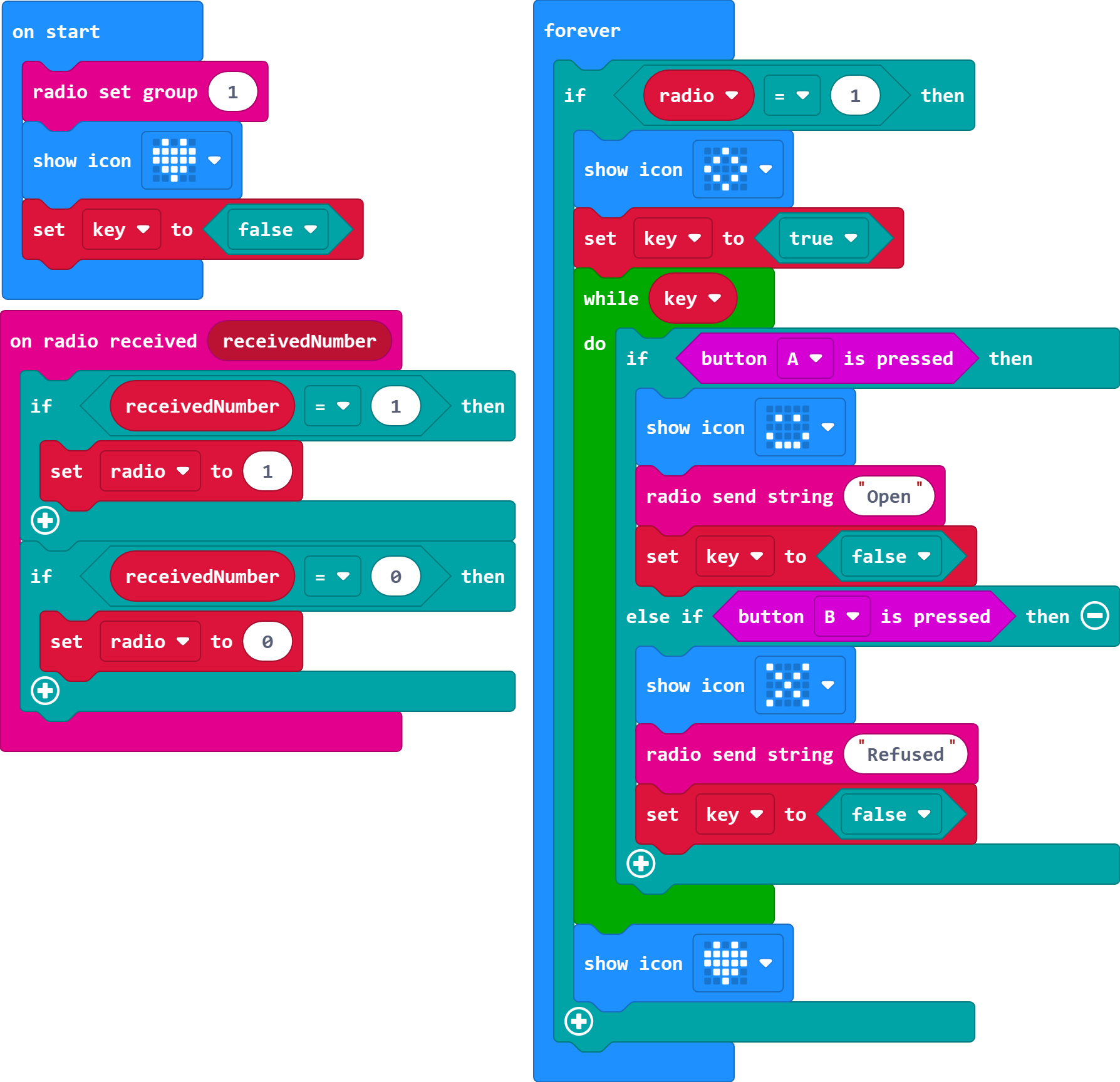
程序链接:https://makecode.microbit.org/S60091-73106-37070-71707
案例演示
当有人访问房子时,按动碰撞传感器,此时门锁端的micro:bit发送信号通知遥控端的micro:bit,当遥控端的micro:bit接收到信号时,显示图案,此时按下遥控端的micro:bit的A按键,则门锁端的micro:bit显示笑脸图标并控制舵机打开房门,并在OLED显示屏上显示“Welcome”,如果按下遥控端的micro:bit的B按键,则门锁端的micro:bit显示×图标,并在OLED显示屏上显示“Refused to enter”。
