哪吒A主控盒
简介
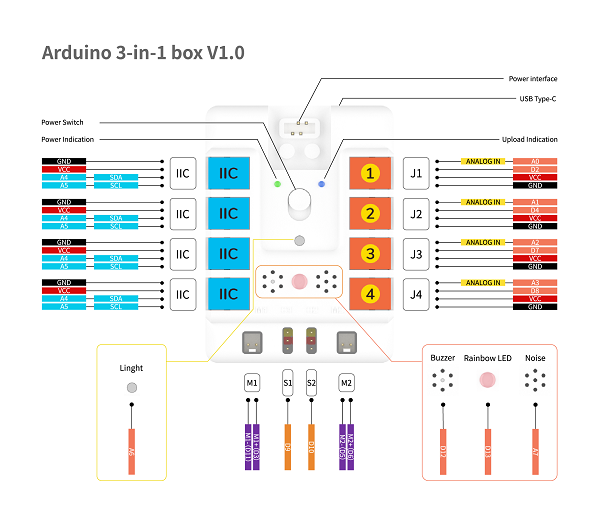
哪吒A主控盒是一款基于 ATMEGA328P的可编程主控,它板载2路舵机驱动,2路电机驱动,8路传感器扩展接口;传感器接口均采用RJ11接头,防呆防反插,方便学生们在课堂上快速准确连线;外壳设有乐高兼容接口,可将电子模块与乐高积木结合起来,方便学生们搭建个性化的创意编程作品。
产品图片

产品参数
| 技术类别 | 参数 |
|---|---|
| 产品名称 | 三合一扩展板 |
| 控制器 | arduino uno |
| 编程方式 | arduino ide |
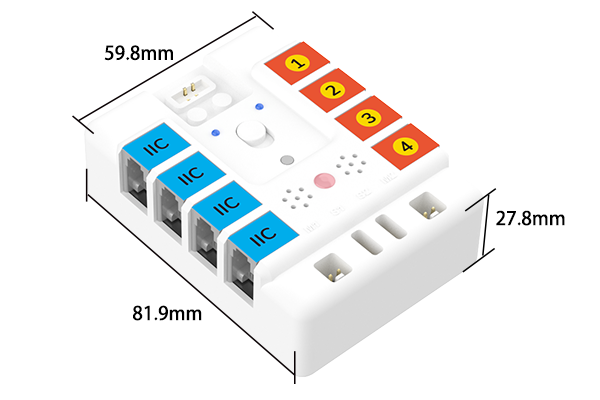
| 产品尺寸 | 59.8mm × 81.9mm × 27.8mm |
| 产品重量 | 70克 |
| 电源 | 9V |
| 工作电压 | 9V |
产品尺寸
快速上手
主要模块介绍
安装电池盒

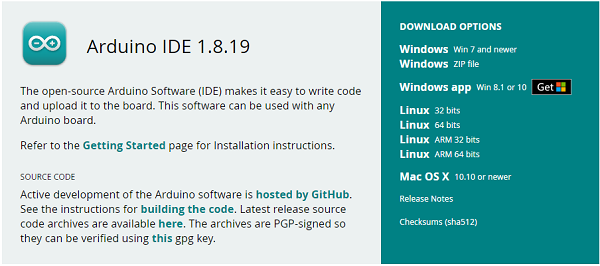
下载并安装Arduino IDE
Arduino 官方网站上下载最新版本的 Arduino IDE: https://www.arduino.cc/en/Main/Software,并根据系统选择下载安装。
软件编程
下载并解压哪吒A主控盒的库文件Arduino-3-in-1-box
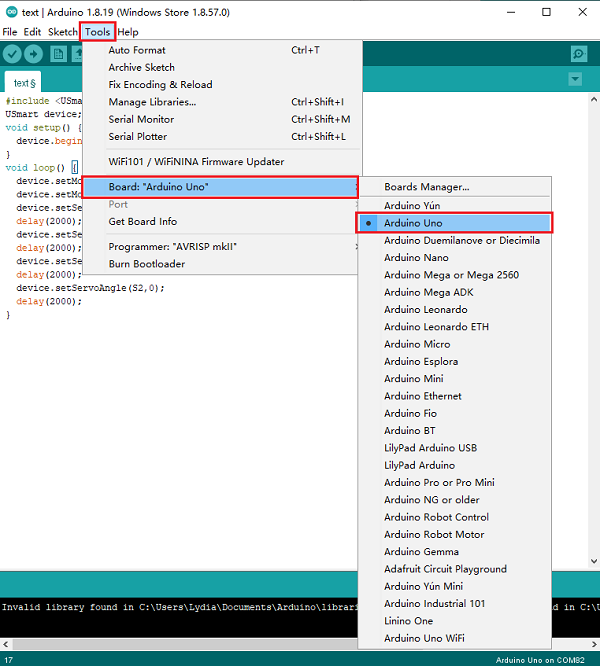
打开Arduino IDE 并选择工具-开发板-Arduino Uno。
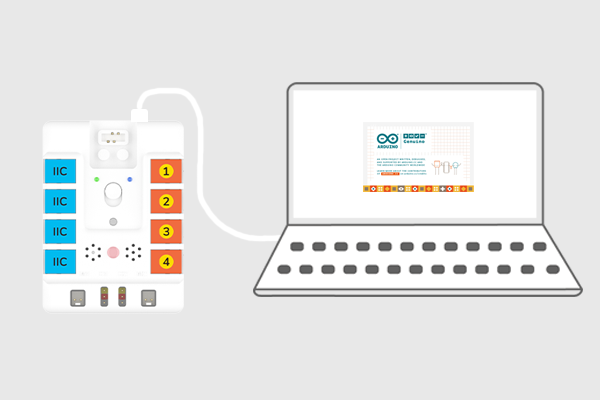
使用type-c数据线将哪吒A主控盒连接至电脑端。
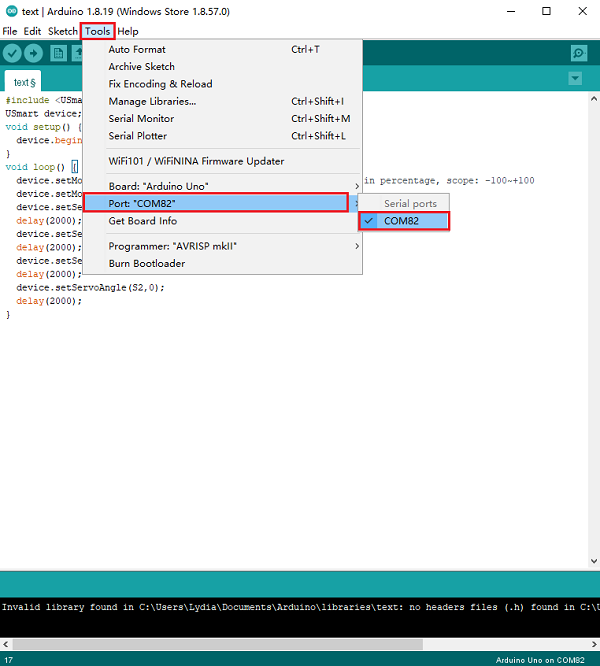
连接完成后,点击工具-端口,设置硬件连接的端口。
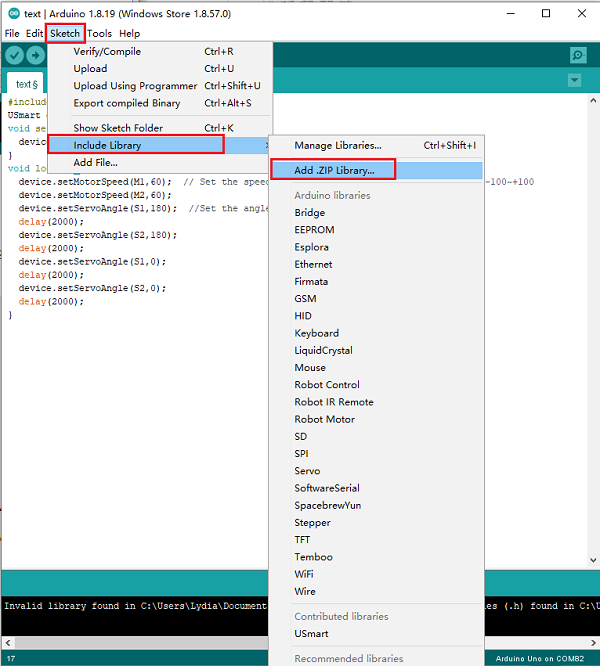
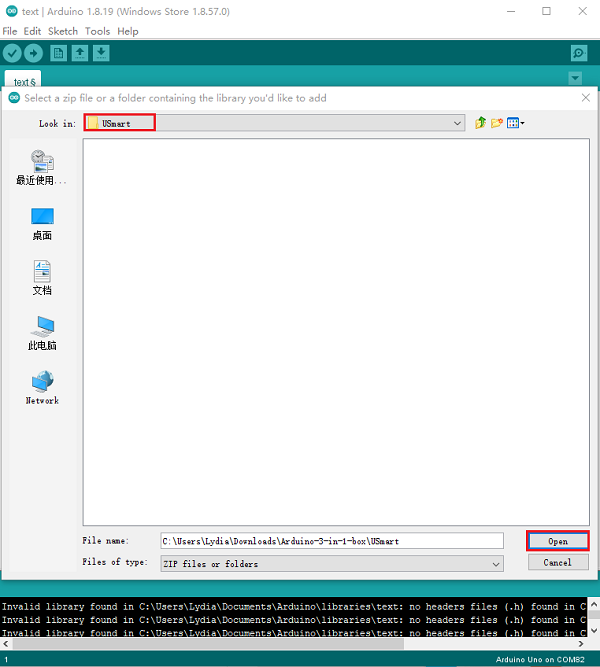
点击项目-加载库-添加.ZIP库...。
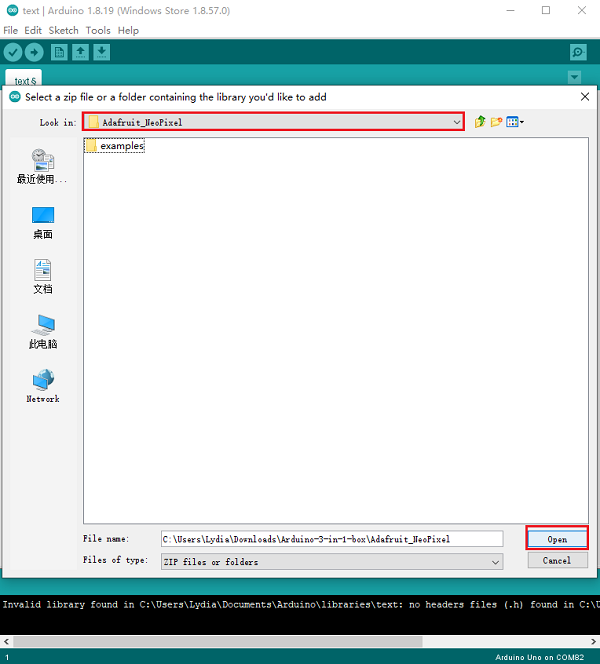
选择并打开Adafruit_NeoPixel文件夹,添加哪吒A主控盒的扩展库的依赖库文件。
选择NezhaA-main.zip,添加哪吒A主控盒的扩展库文件。
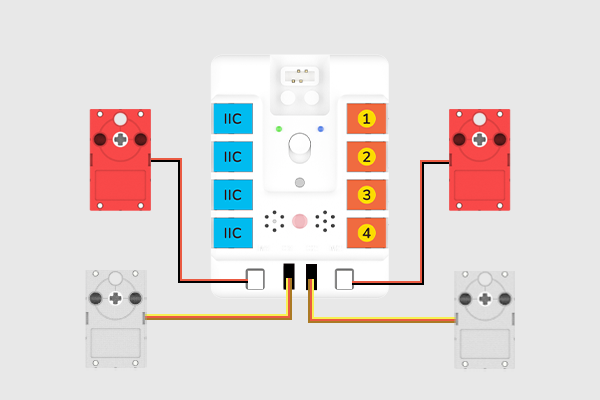
硬件连接
分别将两个电机和两个舵机连接到哪吒A主控盒的M1、M2和S1、S2。
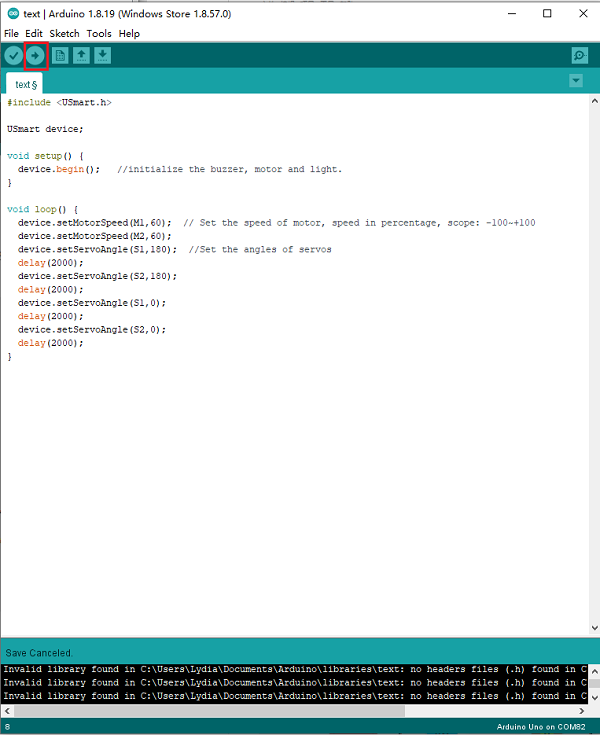
编写程序
通过哪吒A主控盒控制舵机和电机转动。
#include <USmart.h>
USmart device;
void setup() {
device.begin(); //初始化蜂鸣器、电机、舵机、灯光
}
void loop() {
device.setMotorSpeed(M1,60); //设置电机速度,速度为百分比,范围:-100~+100
device.setMotorSpeed(M2,60);
device.setServoAngle(S1,180); //设置舵机角度
delay(2000);
device.setServoAngle(S2,180);
delay(2000);
device.setServoAngle(S1,0);
delay(2000);
device.setServoAngle(S2,0);
delay(2000);
}
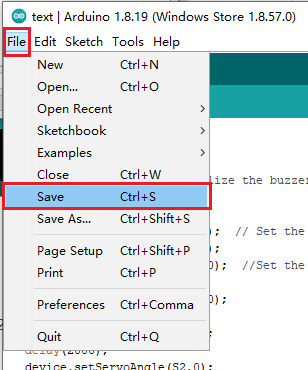
点击文件-保存,保存程序文件。
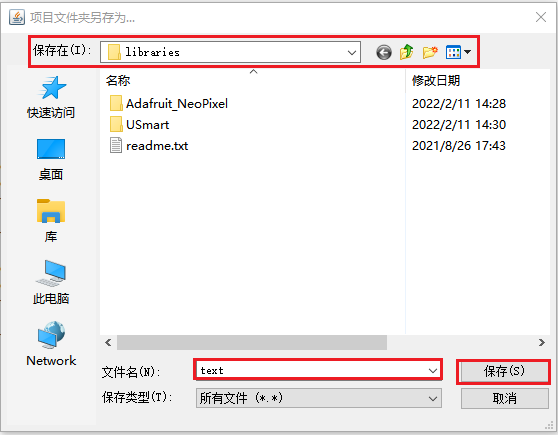
选择保存路径,设置文件名并点击保存。
点击上传按钮,将程序上传至哪吒A主控盒。
结果
开启电源后,两个电机开始转动,并且两个舵机轮流转动到设定的角度。