expansion-Sonarbit-module
简介
哈喽,接下来你要使用的 Sonar:bit 是一个3线宽压超声波模块,它的工作电压为3.0V-5V,3.3V或5V的单片机系统均能使用;它只需要3根线(G、V、S)就可以工作,比常规的4线超声波模块节省一个 IO 口。Sonar:bit 量程为4cm~400cm,测量数据稳定准确,误差仅为±1cm。 它可以使用扩展片与 Ring:bit 连接,为 Ring:bit 小车扩展超声波功能。

特性
输入电压为3V~5V,Pico:ed 能直接驱动。 标准的3线 GVS 接口,仅占用一个 IO 口。
参数
| 项目 | 参数 | 备注 |
|---|---|---|
| 品名 | Ring:bit Car v2 专用超声波扩展模块 | |
| SKU | EF04089 | |
| 工作电压 | DC 3-5V | |
| 接口 | 3pin GVS 接口 | |
| 输出信号类型 | 模拟 | |
| 量程 | 4~400cm | |
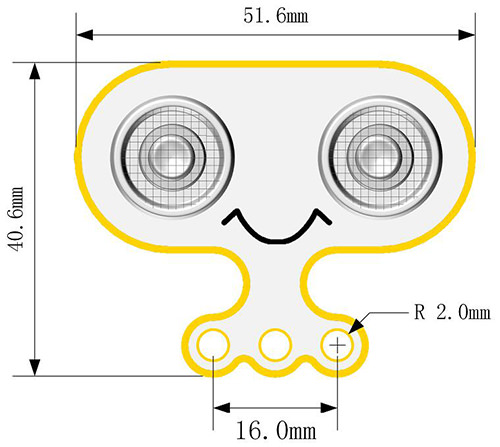
| 尺寸 | 40.60×51.60mm | |
| 净重 | 12g |
外形与安装定位尺寸
快速上手
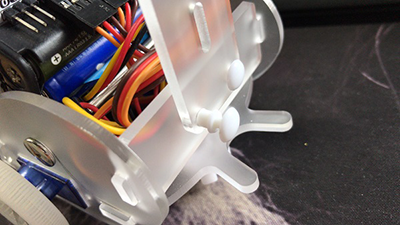
硬件连接
首先使用铆钉将扩展亚克力连接到Ring:bit小车后板插口。
再将Sonar:bit使用铆钉连接到扩展亚克力板上方。
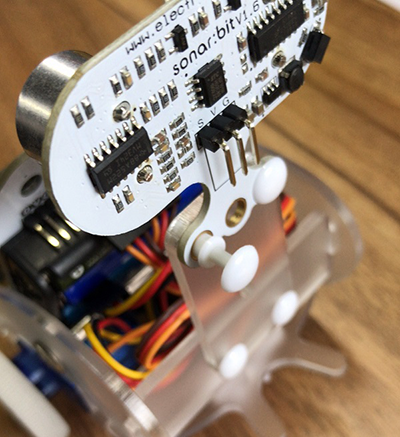
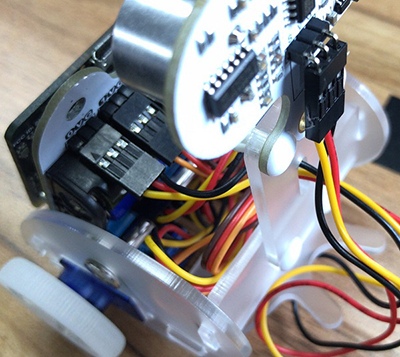
使用3pin连接线连接到 Ring:bit 扩展板,扩展完成。
程序编写
想必你应该已经准备好了编程环境,如果没有准备,可以参考这篇文章:编程环境准备
代码示例
# 导入程序所需要的模块
import board
from ringbit import *
# 设置Ring:bit左右轮子舵机的引脚
ringbit = Ringbit(board.P1, board.P2)
# 根据超声波传感器检测的距离改变小车速度
while True:
if ringbit.get_distance(board.P0, Unit.cm) > 20:
ringbit.set_speed(100, 100)
else:
ringbit.set_speed(0, 0)
代码详解
- 导入程序所需要的模块:
board模块是引脚名称的通用容器,可以通过board模块指定要使用的引脚,ringbit模块包含对Ring:bit智能车操作的类和函数。
import board
from ringbit import *
- 设置Ring:bit左右轮子两个舵机的引脚。
ringbit = Ringbit(board.P1, board.P2)
- 根据超声波传感器检测的距离更改小车的速度。
while True:
if ringbit.get_distance(board.P0, Unit.cm) > 20:
ringbit.set_speed(100, 100)
else:
ringbit.set_speed(0, 0)
实验结果
Ring:bit 小车在没有障碍物的时候正常行驶,有障碍物则停下,当障碍物离开继续行驶。