AI摄像头控制吸管机械手
简介
这节课我们需要用到AI摄像头和吸管机械手套件,根据AI摄像头识别不同颜色的小球做出不同的手势。
恩孚科技独立研发的AI摄像头可以实现人脸识别、小球识别、卡片识别、巡线识别、颜色识别和特征学习的功能。
关于AI摄像头更为详细的内容请参考:AI摄像头相关文档
所需材料
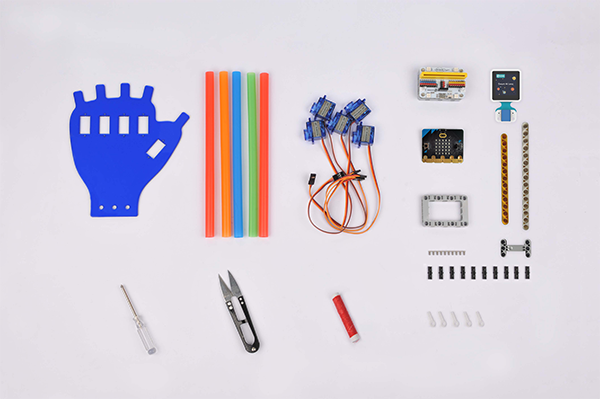
组装步骤
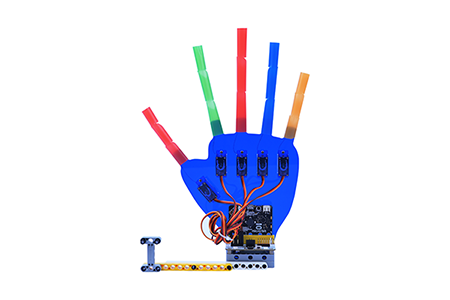
一、吸管机械手组装 吸管机械手的组装步骤请参考:吸管机械手
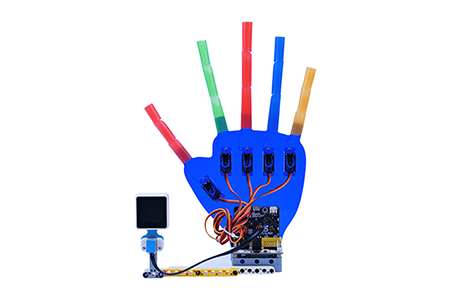
二、AI摄像头组装
1、首先使用3颗黑销插入孔壁圈上并将15孔梁安装到黑销上面,如图所示:

2、将13孔梁以及黑销按如图所示安装:

3、将H型孔壁按如图所示安装:
4、将AI摄像头和RJ11转杜邦线按如图所示连接,注意:RJ11连接悟空扩展板的连接顺序如图所示:
开始编程
micro:bit编程是使用 Makecode 编程平台,关于添加悟空扩展库和编程方法,参考上一篇案例文档:吸管机械手。
初始化
本教程所使用的初始化状态是:0度代表“手指”完全伸展,180度代表“手指”弯曲,所以,在开始正式编程之前要将舵机角度调整到0度。将单摆臂取下,使用 Makecode 编程如下程序代码,同时也可以直接下载下方程序。
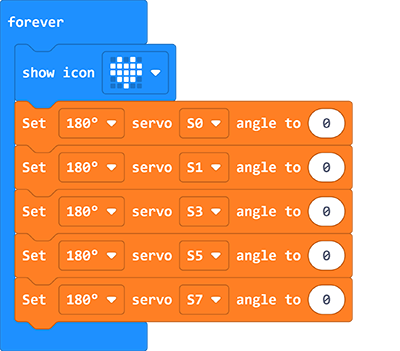
程序代码:
将调整好后的舵机安装上单摆臂,就可以运行下方的程序代码,当然您也可以发挥自己的创造力,做出不同动作的“手舞”。
简单示例

参考程序链接:AI摄像头控制机械手
同时,也可以从直接运行下方编程积木块:
常见问题
吸管机械手使用的是180度舵机,所以控制舵机积木块的数值范围是:0~180。下载编程好的积木块代码到micro:bit后,打开悟空扩展板的电源开关,关于悟空扩展板的详细使用内容请参考其相关文档。